High Level Questions Examples . Connect with your own divinity. Higher order thinking skills question templates recall note: Higher order thinking questions from www.slideshare.net The teacher also wants to find out if the student are able to relate these. The script’ by creating a classroom environment where questioning becomes a strength and students feel free to ask questions. Level 3 questions are useful as….
Ftc Servo Example Code. Variables defined by the class •methods: Using a regulated motor as a servo;
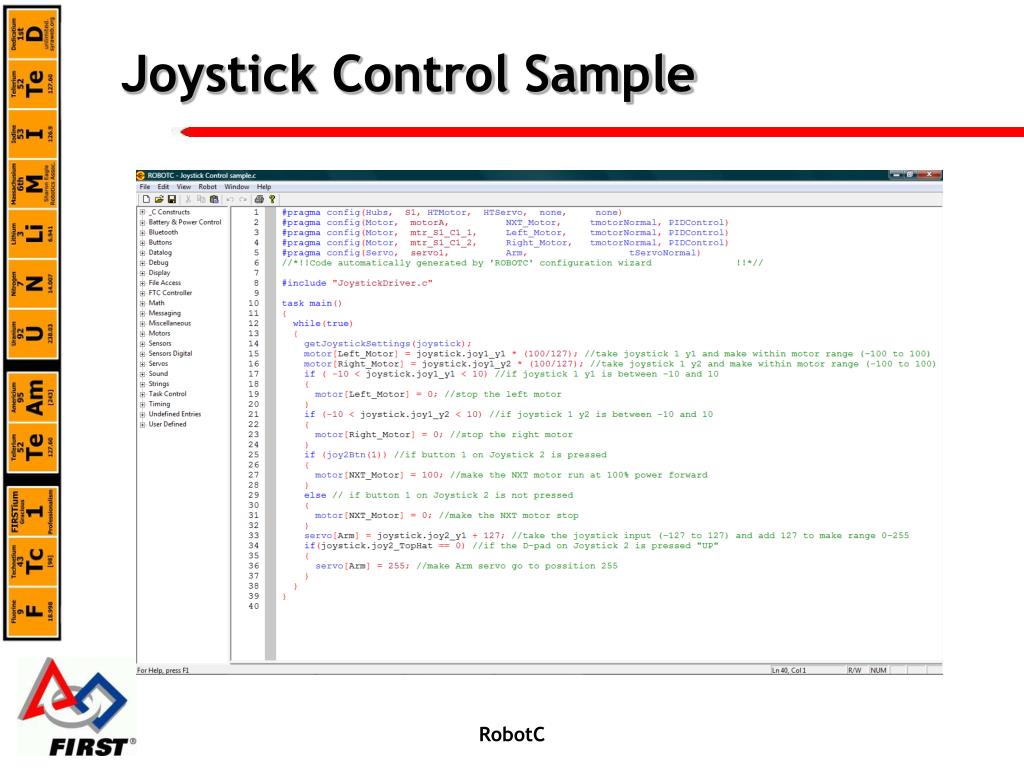
PPT Coding for the FIRST Tech Challenge RobotC PowerPoint from www.slideserve.com
Go to the clock configuration. Then servo positions will be scaled to fit in that range: Generate the initialization code & open the project in your ide.
Set The System Clock To Be 72Mhz.
Then you can use the setposition () method. Variables defined by the class •methods: We have partnered with thousands of teams over the course of several years and are excited to continue to support teams in new and exciting ways from sponsorships in the form full ftc kit giveaways, $500.00 store vouchers and free parts to technical guidance, event donations, college scholarships and many other great opportunities.
Let's Move On To Sensors.
At the end we suggest actions to tune the. Defines data format and procedures •properties: Next, copy and paste the following code into a new sketch file inside the arduino ide.
Color, Touch, Limit, And Distance.
Lets extend our tank drive example to operate these servos: Look at the example and know that soon you will understand what this java code does. You may have to do some fiddling to find the stop position, since it might not be.50, for my crservo it was.49.
We Are Trying Get A Continuous Rotation Servo To Move Forward And Backward To Extend And Retract An Arm.
The width of the pulses determines the position of the output shaft. There are also continuous rotation servos. Go to the clock configuration.
Op · 6Y · Edited 6Y.
In this example, we will determine the kinematics of the movement, the sizing of the servo motor and discuss some design considerations and we will show how to wire the servo drive to the plc dl06. The speed can be controlled by changing how far away from the. This is useful if your servo has only a limited useful range of movement due to the physical hardware that it is manipulating (as is often the case) but you don't want to have to manually scale and adjust the input to setposition() each time.


Comments
Post a Comment